







——DWIN Developer Forum-ից
Լուծումը ընդունում է T5L չիպը որպես հիմնական հսկողություն, վերահսկում է GRBL-ը սերիական պորտի 2-ի միջոցով և շարժիչը մղում է կառավարելու փորագրող մեքենայի հիմնական շարժիչը՝ ստեղծելու X, Y և Z առանցքների փորագրման ուղու բազային ուղին, որպեսզի գիտակցի ավտոմատ փորագրման գործողություն:Այն ունի գեղեցիկ ինտերֆեյսի, ճշգրիտ հսկողության, բազմաառանցքային կառավարման և գործիքի ավտոմատ կարգավորումների գործառույթներ:
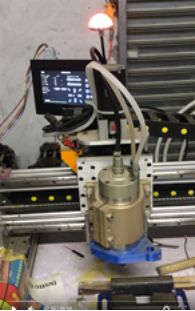
Նկարագրություն:
1. Վերահսկել GRBL-ը DWIN սերիական պորտի 2-ի միջոցով;
2. GRBL սերիական պորտը իրականացնում է հաղորդագրության, սեգմենտավորման և ընդհատման ցուցադրումը;
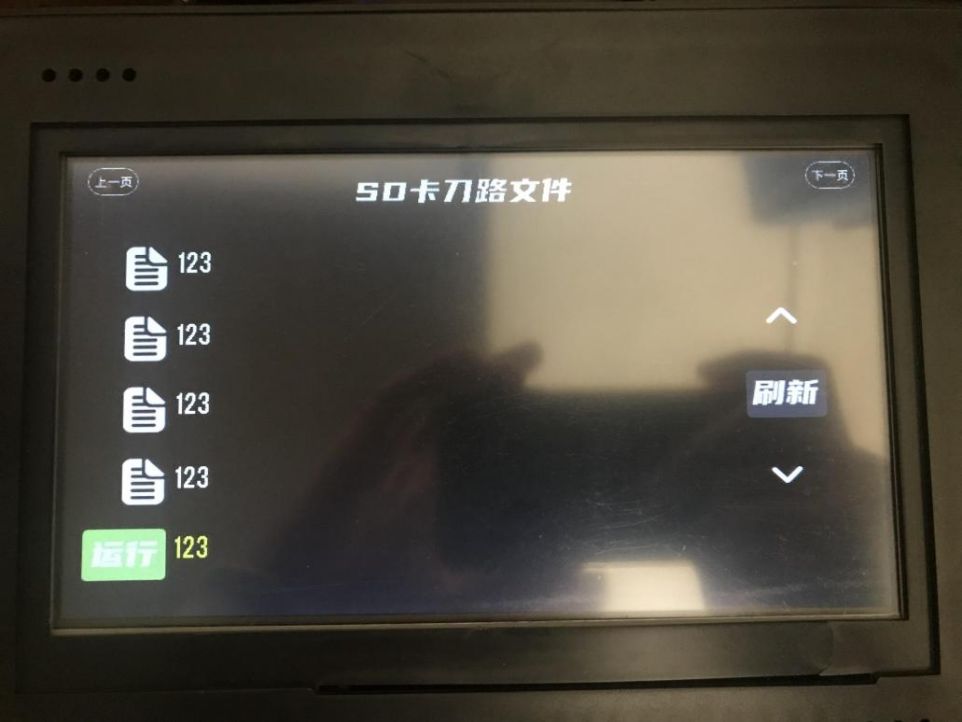
3. Էկրանը վերահսկում է տարբեր գործառույթներ, ինչպիսիք են GRBL շարժումը՝ ուղարկելով հրահանգներ;
4. Աջակցեք ձեռքի անիվի կառավարմանը, համատեղելի Weihong handwheel ինտերֆեյսի սահմանման հետ;
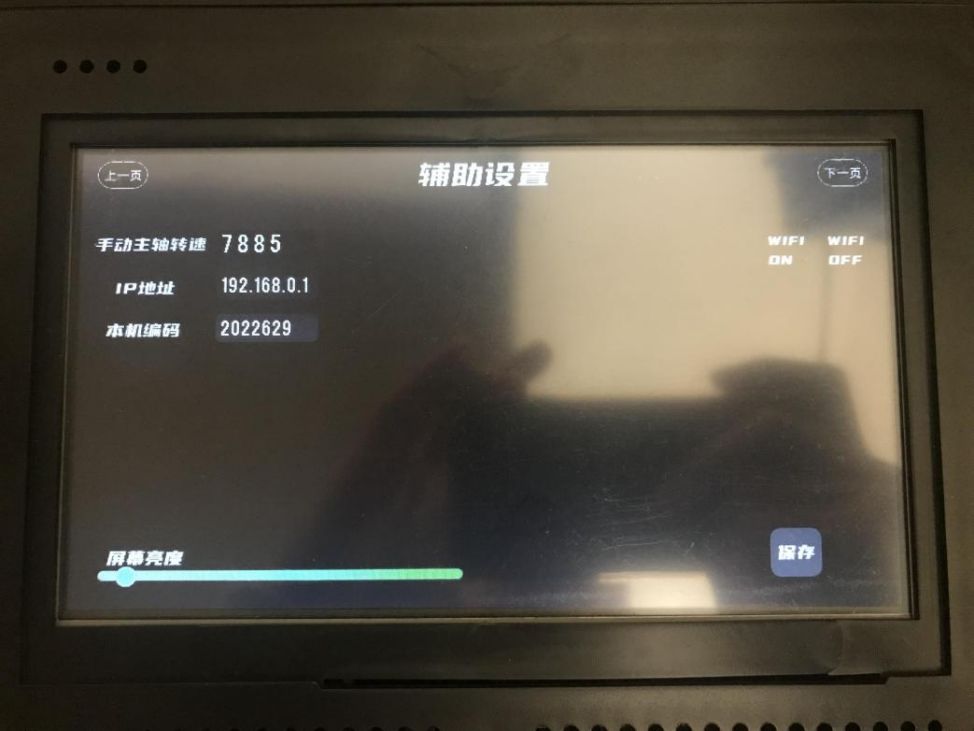
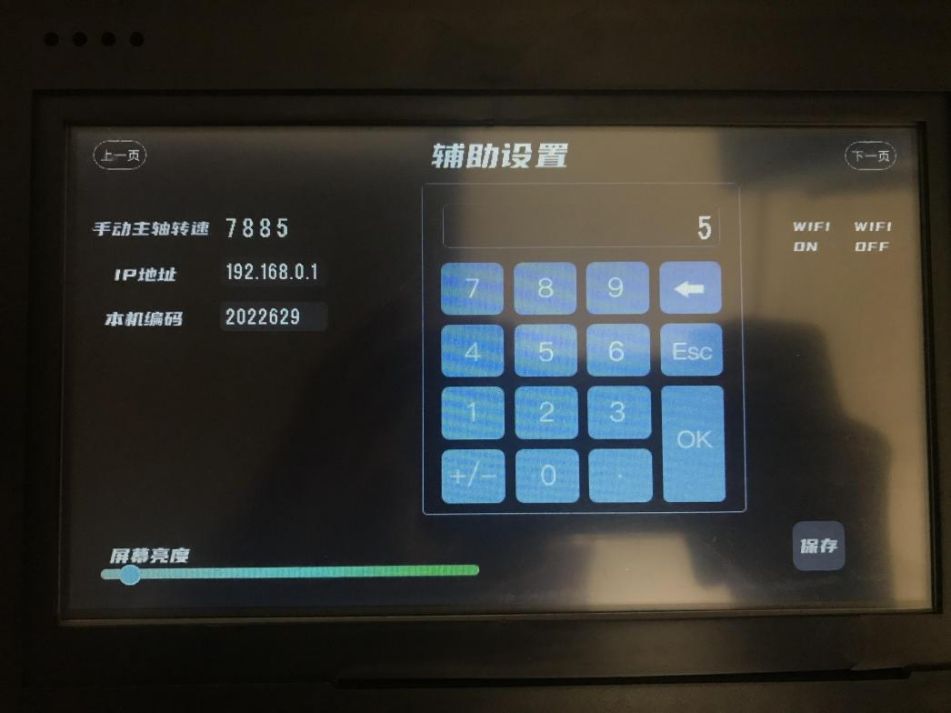
5. Էկրանի պարամետրերը կարող են պահպանվել անջատումից հետո;
6. Կառավարելով WS2812-ը՝ ցուցադրելու կարգավիճակի լույսերը, ինչպիսիք են պարապ, կանգառ և աշխատանք;
Լուծման ձևավորում.
(1) DGUS ինժեներական ինտերֆեյսի նախագծման գծագիր

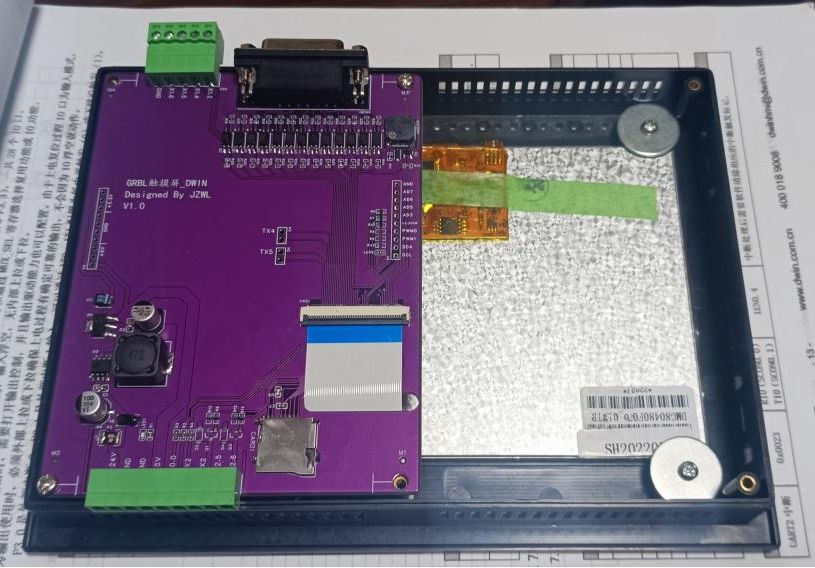
(2) Backplane դիագրամ

Ծանուցում.
1. GRBL-ի ESP32-ը կարող է օգտագործել օրիգինալ տարբերակը առանց փոփոխության;
2. Բացեք էկրանի PCB ֆայլի ներբեռնման հավելվածը Easytron-ով, և դրա սխեմատիկ դիագրամը և PCB-ն կարող են ուղղակիորեն ապացուցվել;
3. Միջուկի ֆայլը պետք է լինի վերջինը:Այս նախագիծը օգտագործում է միջուկի տարբերակը հավելվածում, և միջուկը պետք է առանձին թարմացվի:
Հրապարակման ժամանակը` Հունվար-10-2023